
当前位置:首页 > 产品中心














































大球小球研磨制粉机械阿蒙

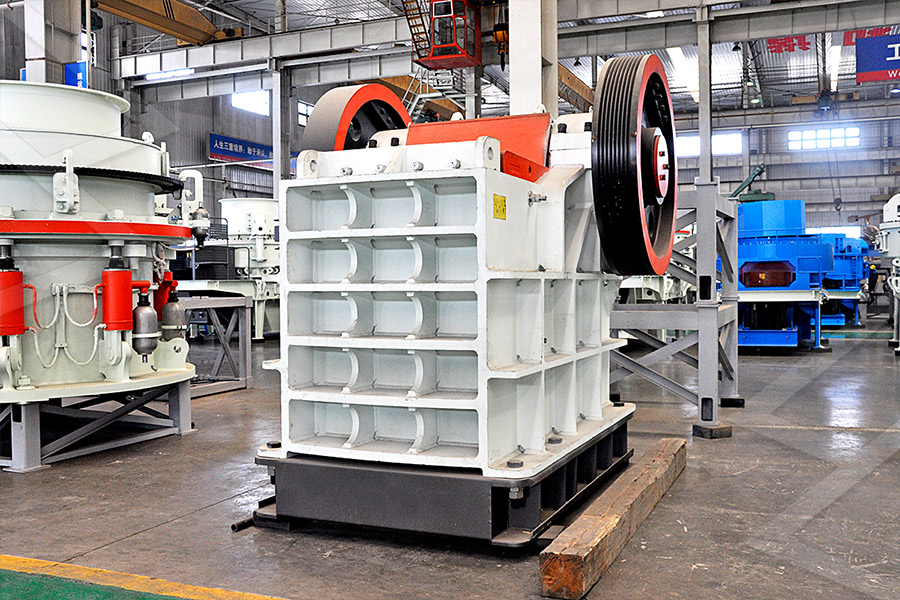
球径大小对制粉性能有何影响? Kintek Solution
球径大小对制粉性能有何影响? 球径大小对研磨性能的影响是显著和多方面的。 球磨机中使用的磨球尺寸直接影响着研磨过程的效率和最终产品的质量。 下面将详细介绍不同尺寸 需要考虑的 5 个关键因素 说到球磨机,所用钢球的尺寸是一个关键因素,可显著影响研磨过程的效率和效果。 选择球磨机用球尺寸时应考虑的 5 个关键因素 1研磨球的尺寸范围 球磨机用球的尺寸?需要考虑的 5 个关键因素 Kintek Solution立式球磨机的工作原理:冲击、研磨和尺寸缩小 立式球磨机是将物料研磨成细粉的关键设备,其工作原理依赖于冲击和研磨机制。 本文将探讨立式球磨机的构造、操作和优势,并将其与卧式球磨机进行比较。 了解立式球磨 立式球磨机的工作原理:冲击、研磨和尺寸缩小2020年4月10日 国内生产研磨介质小球也有采用滚制成型工艺,粉体直接滚制法使用简单廉价的旋转滚球机,先加入预制的球坯晶种,然后边旋转喷水雾边添加陶瓷粉体,粉体不断粘附于晶种表面逐渐长大,最终得到所需 从粉体到研磨球,这里总结了全部流程要闻资讯中

Dolomit MDDP 四辊磨粉机 Dolomit MDDQ 八辊
突出特点 食品安全 卫生设计 我们对磨粉机的形状和气流进行精心设计,以抑制粉尘。 喂料模块采用 180° 旋出式设计,易于清理。 隔板也使接近不同机器部件变得更加容易,便于清理和清空残留物。 可选磨辊拆卸装置 PesaMill 高压缩磨粉机可生产各种面粉,包括阿塔面粉和用于扁面包的全麦面粉以及深色面粉和标准烘焙面粉。 Nova S 珠磨机 我们的 Nova S 珠磨机可为您的巧克力浆料和代脂研磨设立标准。制粉,研磨,轧胚 食品和饲料 布勒集团 Bühler 4 天之前 KemiSphere II 是一款小型单工位球形研磨和抛光机,非常适合将 2 个球形匹配在一起,或者通过适当的工具,它能够研磨和抛光球形,使其圆度小于 5μm,并达到镜面光洁度。球形/球研磨和抛光 科密特科技(深圳)碎,即大球主要靠冲击和压碎对粗矿粒产生粉碎作用; 而小球主要靠研磨和打击次数将细矿粒磨细,形成大 球打大粒,小球磨小粒的状态。故对给定的球磨机和 在一定的球荷下, 如何选择球磨机磨球的尺寸 百度文库

如何确定行星式球磨机的球粉比!捷宸仪器
2024年7月31日 确定行星式球磨机的球粉比涉及多个方面的考虑,包括研磨介质的大小和硬度、研磨时间、球磨罐的大小以及具体的实验要求。 以下是一些建议,帮助你确定合适 2018年10月15日 研磨介质对粉磨工艺来说非常重要,合理的球磨机介质配比非常重要,通常需要加入不同直径大小的大中小球,且要遵循大球小球少,中球多的原则,具体的配比要通过磨矿试验来确定;球磨机粉磨过程与粉磨工艺优化2016年1月26日 1大、小球分拣传送机械示意图 11大、小球分拣传送机械示意图如图1所示: + + LS1 LS3 LS2 LS4 LS5 电磁铁 M PS0 图1大、小球分拣传送机械示意图 图2机械控制面板 12大、小球分拣传送机械控制系统设计要求 (1)机械臂起始位置在机械原点(见 大、小球分拣传送机械控制系统设计1 豆丁网2013年3月29日 31 机械臂分拣大、小球控制程序的梯形图 本系统采用STEP 7 MicroWIN SP4(S7200)V40软件调试,机械臂大、小球分拣传送机械控制系统设计程序的梯形图见下图31,共有11个网络,11层控制系统,具体详析见下图所示: 32 机械臂分拣大、小球控制程 大、小球分拣传送机械控制系统设计 豆丁网
.jpg)
“大球落幕,小球兴起”的演变史,NBA规则缔造小球时代
2019年8月8日 所谓的“小球”其实就是以牺牲大个球员和低位为代价的球队,其成功的关键在于锋线球员,而不是后卫。 比如勒布朗詹姆斯、凯文杜兰特或安德烈伊戈达拉,这些冠军球队的前锋的共同特点是,他们能够胜任多个位置的进攻或防守,并灵活地游走于不同位置之 22大小球分拣系统的结构 机械手分拣大小球的工作示意图如图11所示。 图11机械手分拣大小球的工作示意图 23 I/O编址及工作框图 输入地址 对应的外部设备 输出地址 对应设备的操作 I00 设备的启动按钮 最大限度地满足被控对象或产生过程的控制要求。大小球分拣传送机械PLC控制梯形图的设计与调试 百度文库2012年12月12日 关键词:大小球分拣控制系统;PLC设计;机械手 大、小球分Fra Baidu bibliotek传送机械控制系统设计 XXXXX学院 课程设计说明书 设计题目:大、小球分拣传送机械控制系统设计 学生姓名:XXXXX 学号:XXXXX 专业班级:XXXXX 指导教师:XXXXX 2012年12月12日大、小球分拣传送机械控制系统设计 百度文库2011年12月1日 4机械臂有形式有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);压着小球是,下限开关LS2接通(=“1”)。 13大小球分拣传送机械控制系统设计思想 关键词:大小球分拣控制系统;PLC;行程开关大小球分拣传送机械控制系统设计 百度文库
.jpg)
大、小球分拣传送机械PLC控制梯形图的设计与调试 百度文库
机械臂右行 I04 大小球的选择开关 Q04 机械臂吸球/放球 I05 小球的选择开关 定时器 定时时间 I06 大球的限位开关 通过此次设计,了解了PLC机械手在大小球分选系统的工作原理,首次学习了一些机械手的工作原理及使用方法。其中电路及软件实现是此次设计4)如果是小球,则右行到LS4处;如果是大球,则右行到LS5处。 5)机械手下降,当碰到下限开关LS2时,将小球释放到小球容器中;如果是大球,则释放到大球容器中。 6)释放后机械手提升,碰到上限开关LS3后,左行。大、小球分拣传送机械PLC控制梯形图的设计与调试 百度文库2023年11月16日 与其他制粉方法相比,雾化法 生产效率高,普适性好,可实现大规模、低成本的生产,可生产具有2种元素及以上的合金粉末,是制备金属粉末的主流生产方法之一。目前,采用雾化制粉技术生产的金属粉末约占世界金属粉末总产量的80%以上。主流的几种金属粉末制备方法粉体资讯粉体圈 2020年6月16日 019.职业教学电脑乐园119基于PLC的机械手分拣大小球系统设计刘丹营口职业技术学院,辽宁营口摘要:机械手能够部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送,还能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。关键词 基于PLC的机械手分拣大小球系统设计 道客巴巴

PLC课程设计大小球分拣系统 百度文库
221大小球分拣系统的结构j 机械手分拣大小球的工作示意图如图21所示。 图21 机械手分拣大小球的工作示意图 222主电路设计及流程图 大、小球分拣传送实质上是由电动机控制的机械臂完,其主电路就是电动机的正反转电路。主电路电路图如图22所示。 图22大球 小球 N Y 图22机械臂分拣大、小球控制的运行框图 表21 I/O分配表 输入地址编码 信号名称 元件名称 元件符号 I00 启动信号 常开按钮 SB1 I01 停止信号 常开按钮 SB2 I02 急停信号 常开按钮 SB3 I03 左限信号 常开开关 LS1 I04 下限信号 常开开关 LS2大、小球分拣传送机械控制系统设计 百度文库2021年8月26日 6)释放后机械手提升,碰到上限开关LS3后,左行。7)左行至碰到左限开关LS1时停下来,至此,一个工作循环结束2。2大、小球分拣传送机械系统的结构大小球分拣传送机械的工作示意图如图21所示。图2—1大小球分拣传送机械的工作示意图2。大、小球分拣传送机械plc控制梯形图的设计与调试 豆丁网接通开关SB1,机械手得电,下行至LS2,I02得电,停止下降,捡球装置给平板处的电磁线圈(KM)通电,捡球平板产生电磁吸力吸住钢球,此时压力感应器I04用来判断是吸住的大球还是小球,如果压力感应器I04的输出断开,说明吸住的是小球,而如是闭合基于:PLC控制机械手抓取大小球课程设计 百度文库

怎么判断球磨高熵合金粉末已经完全机械合金化? 知乎
2023年9月4日 【机械合金化】利用等离子球磨技术在AlSnSi合金中创建双尺度结构,显著增强了机械和磨损性能 一段话了解全文 提出了一种在AlSnSi合金中通过传统粉末烧结和热机械处理相结合的方法来产生由粗晶和超细晶组成的双尺度结构的策略。机械手分拣大小球课程设计22 PLC 的选型在满足控制要求的前提下,选型时应选择最佳的性能价格比,具体考虑以下几点。 机械臂右行时有小球右限(LS4)和大球右限(LS5 )之分;下降时,当电磁铁压 对于比较复杂的中大型控制系统,如闭环控制 机械手分拣大小球课程设计 百度文库基于PLC的大小球分拣系统设计关键词:PLC ,大小球,机械臂,原点显示目录摘要1第1章 概述311选题背景312可编程控制器介绍313控制要求4第2章硬件设计521主电路设计522 I/O地址分配及接线图623元件的选择7第3章软件设计931系统流程图932顺序功能图基于PLC的大小球分拣系统设计 百度文库2021年11月8日 16、序设计31 机械臂分拣大、小球控制程序的梯形图本系统采用STEP 7 MicroWIN SP4(S7200)V40软件调试,机械臂大、小球分拣传送机械控制系统设计程序的梯形图见下图31,共有11个网络,11层控制系统,具体详析见下图所示:32 机械臂分拣大、 大、小球分拣传送机械控制系统设计(共22页) renrendoc

大、小球分拣传送机械控制系统设计1详解doc 20页 原创力文档
2016年3月17日 大、小球分拣传送机械控制系统设计1详解doc,电气控制课程设计 设计题目:基于S7200 PLC大、小球分拣传送机械控制系统设计 姓 名: 班 级: 学 号: 指导教师: 成绩评定: 2014年6月16日 1 大、小球分拣传送机械示意图大、小球分拣传送机械示意图如 2015年10月22日 本次我的课程设计的主要内容:大、小球分拣传送机械控制系统设计,如图11。图11大、小球分拣传送机械工作示意图12大、小球分拣传送机械控制系统设计要求本次设计的控制要求如下:1机械臂起始位置在机械原点(见图),为左限、上限并有显示。大、小球分拣传送机械控制系统设计(2) 豆丁网2013年6月26日 重新按下启动按钮后,再次开始,具 体过程如图22 所示 图31 分拣大小球控制的运行框图 11 32 分拣大小球控制程序的梯形图 机械臂大小球分拣传送机械控制系统设计程序的梯形图见下 图31,共有14 个网络,11 层控制系统,具体详析见图所示。大小球分拣传送机械控制系统设计 (1) 豆丁网2017年12月16日 需求 1,显示一个窗口。 2,我们要做到的功能有鼠标点击屏幕生成小球。3,生成的小球大小随机,颜色随机,向随机方向移动,速度也随机。4,大的球碰到小球时可以吃掉小球,吃掉后会变大。5,球碰到边界会弹回去。 思路 思路很简单 1,这个游戏我们使用python的pygame,先生成一个带有背景颜色 HTML5制作简单的大球吃小球游戏教程CSDN博客
}@~3SRDG`IA1KP_ICWAA.jpg)
大小球分拣传送机械PLC控制梯形图的设计与调试 百度文库
当按下时,得电,如果转换条件满足,得电捡球装置下降捡球平板,当下降的捡球平板碰到下限开关SB2时,得电,停止下降,捡球装置给平板处的电磁线圈(KM)通电,捡球平板产生电磁吸力吸住钢球,此时压力感应器用来判断是吸住的大球还是小球,如果压力根据要求,该控制流程根据吸住的是(大球、小球)有两个分支,此处应为分支点,且属于选择性分支。 结合以上几点,在设计PLC机械手在大小球分选系统中用的PLC的选型为西门子S7200系列的可编程控制器。机械手分拣大小球课程设计 百度文库2024年4月17日 1 物料特性:首先,对要研磨的物料进行详细的分析,包括其硬度、密度、脆性、韧性等物理特性。这些特性将直接影响研磨过程中磨球的选择、转速的设定、研磨时间的确定等参数。2 选择合适的磨球:磨球的材质、大小和填充率对研磨效果有重要影响。浆料、粉体制备球磨研磨工艺 知乎113 机械手分类 机械手的种类,按驱动方式可分为液压式、气动式、电动式、机 械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运 动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。机械手分拣大小球的PLC程序设计百度文库
.jpg)
机械手分拣大小球课程设计 百度文库
机械手分拣大小球课程设计着大球时,下限开关 LS2 断开(=“0”);压着小球时,下限开关 LS2 接通(=”1”)。12 大小球分拣的设计思想1) 当机械臂处于起始位置时,上限位开关和左限位开关被压下,接近开关闭合, 原点指示灯亮。2015年3月3日 机械合金化制粉机械合金化制粉AlSi粉料工艺优选 对粒度影响:n>m>球料比 n增加过大,D50↑ ,分布变狭。 外衬聚氨酯球,酒精,12hr,n=150 pm,10:1 可制备D50=58μm,分布均匀的高SiAl合 金混合粉。机械合金化小结我的想法 * 机械合金化,可使原 机械合金化制粉 百度文库2024年1月1日 第1章引言11 大小球分拣传送机械控制系统设计内容简介学院此次安排我们进行了为其两周的机电传动课程设计实习,对我们即将进行毕业设计是很有益处的。这学期我们学习了机电传动控制课程,此次实习主要是对课本中的知识进行实践,比如继电器-接触器控制和可编程控制器控制等重要章节更 大小球分拣传送机械控制系统设计 360文档中心2009年11月28日 本期为《体育人间》为建国六十周年特别制作的十五集系列纪录片,“岁月纪事”。乒乓球是中国的国球,在世锦赛、世界杯、奥运会上尽显风采,其霸主地位不可撼动。但是,当一个项目成为仅仅是中国一枝独秀的时候,也蕴藏着某种危机。有一个人很早就发现了这种危机,他的决断对乒乓球在 小球改大球CCTV节目官网CCTV5央视网 (cctv)

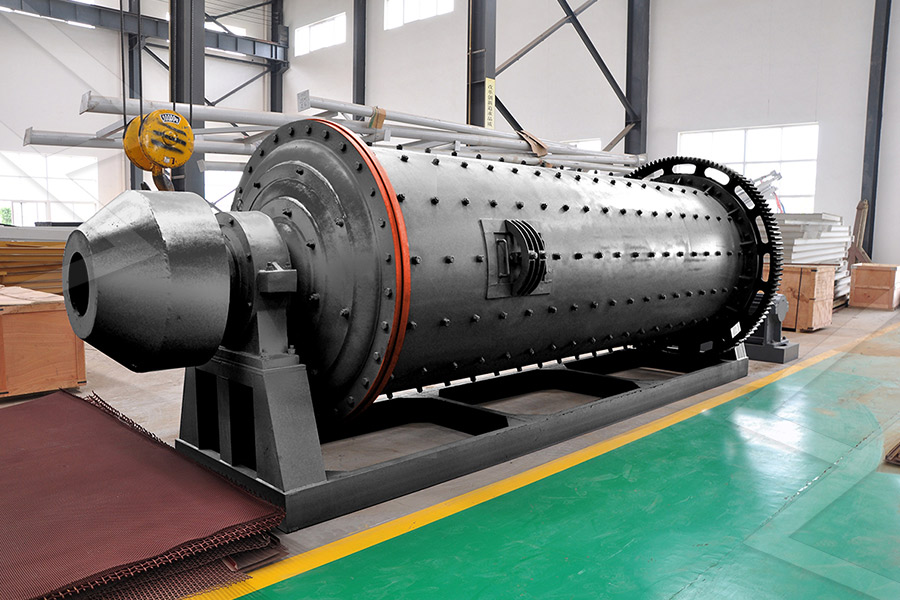
制粉,研磨,轧胚 食品和饲料 布勒集团 Bühler
布勒是食品和饲料产品制粉、研磨或轧胚设备与工艺的供应商。应用包括谷物、大米、油籽、豆类、麦芽和饲料。 数十年来,我们帮助客户研磨从印刷油墨到巧克力或谷物的许多不同的物料。立式球磨机的工作原理是旋转装有钢球、陶瓷球或鹅卵石球等研磨球的圆筒,将物料研磨成细或不太细的介质。铁矿石和陶瓷等物料被加入球磨机并送入筒体。球磨机在垂直或水平轴上旋转,使研磨球反弹并撞击所包围的 立式球磨机的工作原理:冲击、研磨和尺寸缩小2024年1月1日 本课题设计了大、小球的分类选择传送系统,采用日本三菱公司的FX2N系列PLC,对机械臂的上下、左右移动以及对球的抓取和释放的运动过程进行控制。我们利用可编程控制技术,并结合相应的硬件装置,来控制机械臂完成各种动作,实现大小球的分类选择基于PLC的大小球分拣系统设计 文档之家2020年3月13日 请教一下星球的规划问请教一下星球的规划问题大球(20左右的)是造精炼球还是科研球呢?我看一个攻略是说大球造精炼球,小球(10左右)科研球,理想城主工业。大球区划建一产的。但是我看那些练气厂才+1岗位,造满以后整个球星会空请教一下星球的规划问题大球(20左右的)是造精炼球还是
.jpg)
基于PLC的大小球分拣系统设计 百度文库
本次设计的大、 小球分类选择传送 PLC 控制要满足以下控制要 求:机械臂起始位置在机械原点,为左限、上限并有显示;有起动 按钮和停止按钮控制运行,停止时机械臂必须已回到原点; 起动后 机械臂动作顺序为:下降→吸球→上升(至上限)→右行(至右2017年4月23日 摘要机械臂自动分拣机构的积极作用正日益为人们所认识,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的筛选与传送。因为它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐,因此,受到各先进单位的重视并投入了大量的人力 毕业论文(设计)大小球分拣传送机械控制系统设计 道客巴巴2023年10月23日 台球的大小球,顾名思义,是指台球在尺寸上的差异。不同的台球比赛和规则对所使用球的大小有着不同的要求。因此,了解台球的大小球以及它们之间的差异对于喜爱这项运动的人来说非常重要。在台球比赛中,小球通常是指5号球,而大球则是指8号球 台球怎么分球大小球?4)如果是小球,则右行到LS4处;如果是大球,则右行到LS5处。 5)机械手下降,当碰到下限开关LS6时,将小球释放到小球容器中;如果是大球,则释放到大球容器中。 6)释放后机械手提升,碰到上限开关LS3后,左行。PLC大小球分拣系统 百度文库
.jpg)
基于PLC的大、小球分拣系统毕业论文 豆丁网
2017年4月21日 基于PLC的大、小球分拣系统摘要大、小球分拣传送以其对人们生活的积极影响特别是在工业上的普遍应用不断被人们所认识,作为可操控机械,它能够部分的代替人的劳动并能达到生产工艺的要求,遵循事先设定的步骤来完成工件的分拣传送,大大节省了人类的劳动时间,更因其能适应复杂的环境 2016年1月26日 电气控制课程设计 设计题目:基于S7200PLC大、小球分拣传送机械控制系统设计 姓名:大、小球分拣传送机械示意图 11大、小球分拣传送机械示意图如图1所大、小球分拣传送机械控制系统设计1 豆丁网2013年3月29日 31 机械臂分拣大、小球控制程序的梯形图 本系统采用STEP 7 MicroWIN SP4(S7200)V40软件调试,机械臂大、小球分拣传送机械控制系统设计程序的梯形图见下图31,共有11个网络,11层控制系统,具体详析见下图所示: 32 机械臂分拣大、小球控制程 大、小球分拣传送机械控制系统设计 豆丁网2019年8月8日 所谓的“小球”其实就是以牺牲大个球员和低位为代价的球队,其成功的关键在于锋线球员,而不是后卫。 比如勒布朗詹姆斯、凯文杜兰特或安德烈伊戈达拉,这些冠军球队的前锋的共同特点是,他们能够胜任多个位置的进攻或防守,并灵活地游走于不同位置之 “大球落幕,小球兴起”的演变史,NBA规则缔造小球时代

大小球分拣传送机械PLC控制梯形图的设计与调试 百度文库
25 机械手分拣球控制系统的接线图 第三章 机械手分拣大小球系统的PLC程序 31 机械手分捡大小球控制程序流程图 根据要求,该控制流程根据吸住的是(大球、小球)有两个分支,此处应为分支点,且属于选择性分支。2012年12月12日 关键词:大小球分拣控制系统;PLC设计;机械手 大、小球分Fra Baidu bibliotek传送机械控制系统设计 XXXXX学院 课程设计说明书 设计题目:大、小球分拣传送机械控制系统设计 学生姓名:XXXXX 学号:XXXXX 专业班级:XXXXX 指导教师:XXXXX 2012年12月12日大、小球分拣传送机械控制系统设计 百度文库2011年12月1日 4机械臂有形式有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);压着小球是,下限开关LS2接通(=“1”)。 13大小球分拣传送机械控制系统设计思想 关键词:大小球分拣控制系统;PLC;行程开关大小球分拣传送机械控制系统设计 百度文库机械臂右行 I04 大小球的选择开关 Q04 机械臂吸球/放球 I05 小球的选择开关 定时器 定时时间 I06 大球的限位开关 通过此次设计,了解了PLC机械手在大小球分选系统的工作原理,首次学习了一些机械手的工作原理及使用方法。其中电路及软件实现是此次设计大、小球分拣传送机械PLC控制梯形图的设计与调试 百度文库

大、小球分拣传送机械PLC控制梯形图的设计与调试 百度文库
4)如果是小球,则右行到LS4处;如果是大球,则右行到LS5处。 5)机械手下降,当碰到下限开关LS2时,将小球释放到小球容器中;如果是大球,则释放到大球容器中。 6)释放后机械手提升,碰到上限开关LS3后,左行。2023年11月16日 与其他制粉方法相比,雾化法 生产效率高,普适性好,可实现大规模、低成本的生产,可生产具有2种元素及以上的合金粉末,是制备金属粉末的主流生产方法之一。目前,采用雾化制粉技术生产的金属粉末约占世界金属粉末总产量的80%以上。主流的几种金属粉末制备方法粉体资讯粉体圈 2020年6月16日 2019.2 职业教学 电脑乐园 119 基于 PLC 的机械手分拣大小球系统设计 刘丹 营口职业技术学院, 辽宁营口 摘要:机械手能够部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送,还能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。基于PLC的机械手分拣大小球系统设计 道客巴巴